
Published on Feb 13, 2025
Our project was to test motor learning ability throughout three different age groups using a robotic arm. Our project consisted of two different measurement variables: movement duration and movement curvature. The purpose was to see which age group had the best motor learning skills.
Tests on motor learning for children Tests on motor learning for children is not as well known as motor learning in adults. Motor learning is used in many different skills, for example: tennis or dance. Motor learning is important because it is central to skilled movement and abilities between different age groups (Kandel et al., 2013).
This document states that in their experiment the adults “ showed greater hippocampal activity for sequence trials, where as children demonstrated greater signal during random trials.” Motor learning can also be studied in the laboratory, using robots) (Shadmehr and Mussa-Ivaldi, 1994). The investigation we conducted in three age groups (adults, teenagers and children using a robotic arm) was to examine differences in motor learning ability We examined arm movements in different experimental conditions: null field (baseline movements), force field learning where a force was being applied to the robot making your movements curved and washout where the force was taken away, at the end of learning. All of these conditions involved 50 movements from the subject being tested. Each subject had to perform 150 movements overall with the robotic arm.
We hypothesize that motor learning is reflected in progressive improvements in motor performance with training. If the ability to learn motor skills changes with age, then we expect that younger children will show more variability and learn less than the older groups. We also hypothesize that motor learning will be reflected in two different things. If there is motor learning then we expect that movement curvature shall decrease with training and that the duration movement shall approach the desired time.
The materials were:
- a robot arm that measures where you are and applies forces during learning.
- A television that projects movement targets onto a semi-silvered mirror.
- A semi silvered mirror is a mirror that when is exposed to light is like glass but when there is no light it will act like a regular mirror.
- An air sled was used to elevate our subject’s arm (to avoid fatigue) while we are testing. The air sled is placed below the subject’s elbow.
-We have a chair with straps that resemble a seat belt, they are used so that the subject is able to sit and the movement of their body is limited. To allow younger subjects to see the screen clearly.
- A booster seat was used.
-A computer is used to run the whole experiment the computer operating system was called Ubuntu.
-In total 15 subjects where tested. Five were 8-10 years of age, five were 13-14 years old and 5 were adults from ages 18-30.
-During the experiment, subjects where told to make straight movements from a starting point to an end point. Two circles represented the start point and the end point. These circles measured 1.5cm in diameter. The beginning point was in the center of the semi-silvered mirror and was 20cm away from the end position.
-A yellow dot showed the current position of the hand. The required duration was 800 msec. If subjects reached the end point in the right span of time, the end dot turned green. If they got to the end point too late it turned red and if they where too early it turned blue.
-Subjects first performed 50 movements straight out from the body in the null condition while holding the handle of the robot. Here the robot doesn’t apply any forces against the hand, during the subject’s movement from the start position to the end position.
- During the next 50 trials the robot applied a force to the hand. This force acted to the left and caused hand movements to be curved to the left.
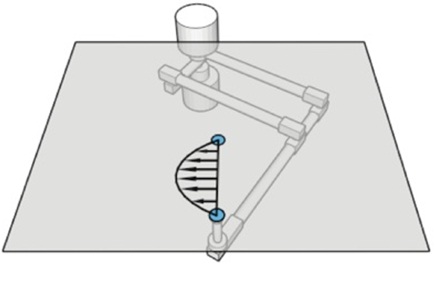
Figure 1 shown on our booth is a schematic figure of the robot arm, and the start and end in a trial. The arrows show the direction in which the force is pushing the arm during force field trials. Subjects then performed another 50 movements in washout trials where no force was applied to their arm during movement. The curvature of the movements provided a measure of motor learning.
Figure 3 shows examples of movement deviation in force-field trials(movement goes to the left.) Shows what a movement would like in null field (the pink straight line)and in the washout stage.(black line)
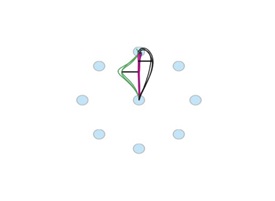
Figure 4 shows a top down view of a hand path during null field movement.
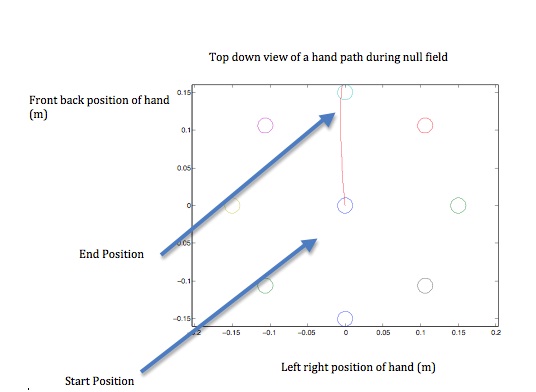
Figure 5 shows a hand velocity profile for a single null field movement
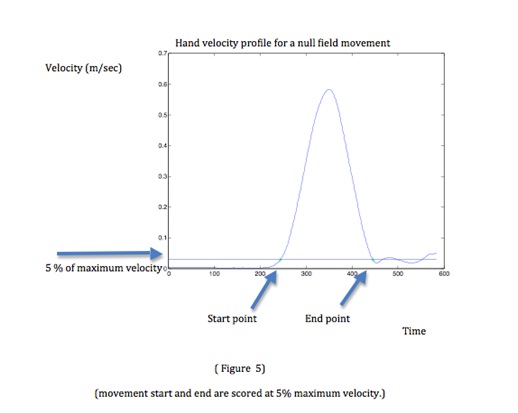
Figure 6 shows a top down view of a hand path during a single force field movement.
Our investigations have shown that adults have better motor learning skills than teenagers and children because there brain is more developed. The adults learnt the most because their brain was the most mature then it was the teenagers who where in between and finally the children had the least best of motor learning skills because their brain has not yet developed The results are consistent with our hypothesis because our data shows that children are more variable than the two other age groups. Our data also supports our second hypothesis that explained that movement curvature would decrease over time and that movement duration would reach the desired time. Our studies will be able to improve future research on children and adults.
Shadmehr R, Mussa-Ivaldi FA. Adaptive representation of dynamics during learning of a motor task. J Neurosci. 1994 May;14(5 Pt 2):3208-24.
Eric Kandel James Schwartz Thomas Jessell Steven Siegelbaum A.j. Hudspeth.
“ Motor Systems Must Adapt to Development and Experience” Principles of Neural Science, Fifth Edition. The McGraw Hill Companies. 2013. Print.
Valeo, Tom. "Human-machine interface to Explore Neuroplasticity in Stroke." Neurology Today 1 (2012): 36-37-38. Print.
Thomas, Kathleen, Ruskin Hunt, Nathalie Vizueta, Tobias Sommer, Sarah Durston, Yihon Yang, and Micheal Worden. " Evidence of Developmental Differences in Implicit Sequence Learning: An fMRI Study of Children and adults." Journal of Cognitive Neuroscience 16 (2006): 1339-1351. Print.